

 微信客服
微信客服直线运动系列
HPS系列
性价比高,耐久性好的直动平台

电机类型
除标准的5相步进电机外,还可选配2相步进电机,或东方电机公司的aSTEP电机或AC伺服电机。
价格低
本体和导轨一体化构造,零件数量少,装配容易,制造成本低。
寿命长
采用了滚珠丝杠结构,耐久性好。
OSMS系列
行程为35~500mm范围的步进电机平台

外形小巧
获CE认证的U型外导轨结构标准型自动平台。
品种多
闭环控制型,可位置计测的,光栅尺标准配备。
选配丰富
可提供高负载的齿轮减速型,或电磁闸的Z轴型。
TAMM系列
兼备了小型·薄型·高耐久性3要素的十字交叉滚柱型自动平台
高耐久性
滚柱和v槽轨道为线接触,刚性好,几乎不存在滑动,摩擦力小,容易实现微小进给。
小型/薄型
体积小,占用空间少,容易配置在需要低光轴的装置中。
尺寸系列
有□40/□60/□100/□100×175mm的系列产品。
HST系列
采用精密滚珠丝杠和十字交叉滚柱导轨的高精度自动平台

高精度
采用了精密滚珠丝杠和十字交叉滚柱导轨的高精度配合的结构,主要材料为钢材,精度高,耐热性能也较好。
高承载
最大承载能力可达392N(40.0kgf)。
高稳定性
主要材料为钢材,台面又较大,容易实现较大载荷的稳定安装。
位置精度
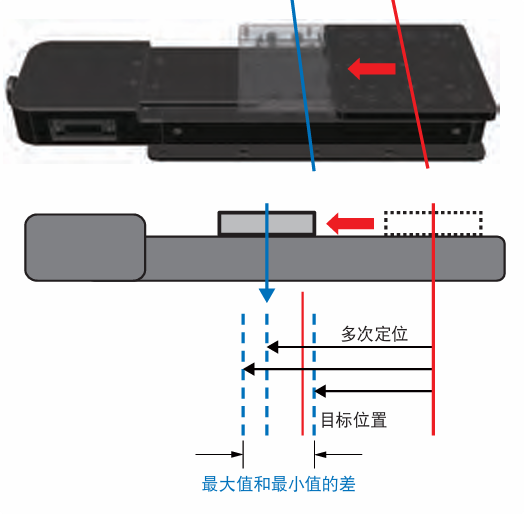
定位精度
从某一基准点开始,在全行程范围内,按一定间隔,单方向依次定位。求出同一定位点的实际测量值和目标值的差,定义其最大值和最小值的差为定位精度。
空行程
在平台的任意位置(两端或中心等),从正方向及负方向进行多次定位,求出点停位置的偏差值的平均值。定义其中的最大值为空行程。
重复定位精度
在平台的任意位置(两端或中心等),从相同方向进行多次定位,输出位置的偏差范围的最大值为重复定位精度。
传动副间隙
在平台的任意位置(两边、中心等),正方向与负方向加载一定推力,我们定义其两个方向的偏移量的总和为传动副间隙。
(参考值)测量结果(HPS60-20X)
| 目标位置 | 方向 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| ↑ | ↓ | ↑ | ↓ | ↑ | ↓ | ↑ | ↓ | |||
| 位置误差 (μm) | 第1次 | 0.0 | -1.2 | -0.1 | -0.6 | -0.5 | -1.0 | -0.5 | -1.2 | -0.1 |
| 第2次 | -0.6 | -1.2 | -0.2 | -0.3 | -0.4 | -0.8 | -0.6 | -1.2 | 0.0 | |
| 第3次 | -0.4 | -1.4 | -0.1 | -0.8 | -0.6 | -0.8 | -0.8 | -1.2 | -0.6 | |
| 第4次 | -0.9 | -1.3 | -0.2 | -0.5 | -0.4 | -0.7 | -0.7 | -1.2 | -0.6 | |
| 第5次 | -1.0 | -1.2 | -0.1 | -0.6 | -0.4 | -1.0 | -0.7 | -1.1 | -0.2 | |
| 最大偏差 | 1.0 | 0.2 | 0.2 | 0.5 | 0.4 | 0.3 | 0.3 | 0.1 | 0.6 | |
| 平均值 | -0.58 | -1.26 | -0.14 | -0.56 | -0.46 | -0.86 | -0.66 | -1.18 | -0.3 | |
| 标准差 | 0.35 | 0.08 | 0.05 | 0.19 | 0.09 | 0.12 | 0.13 | 0.03 | 0.23 | |
| 空行程 | 1.2 | 0.5 | 0.6 | 0.4 | 0.4 | 0.3 | 0.4 | 0.6 | 0.5 | |
| 重复定位精度 | 0.2 | 0.1 | 0.1 | 0.2 | 0.1 | 0.1 | 0.1 | 0.2 | 0.2 | |
| 传动副间隙 | 0.5 | 0.4 | 0.4 | 0.3 | 0.3 | 0.3 | 0.3 | 0.5 | 0.4 | |